彭泳棠
专业名称:土木工程
指导教师:杨健
毕业去向:本校土木工程专业硕士
在校期间学术成果或科创实践成果:2023年第 44 期本科生研究计划(PRP)项目结题,2023 年第28 期大学生创新实践计划项目结题,2024 年上海市结构设计竞赛一等奖,2025 年全国大学生智能建造竞赛特等奖
项目概述
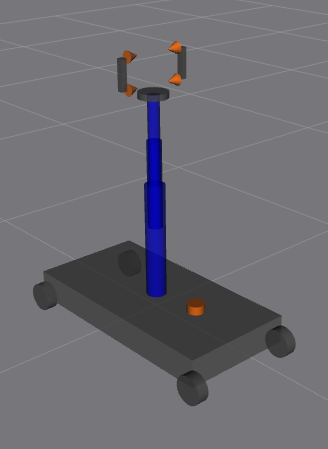
针对电缆隧道蛇形敷设高度依赖人工的问题,设计了一种集自主导航、电缆举升与弧长控制于一体的智能敷设机器人,并完成仿真验证
项目创新点
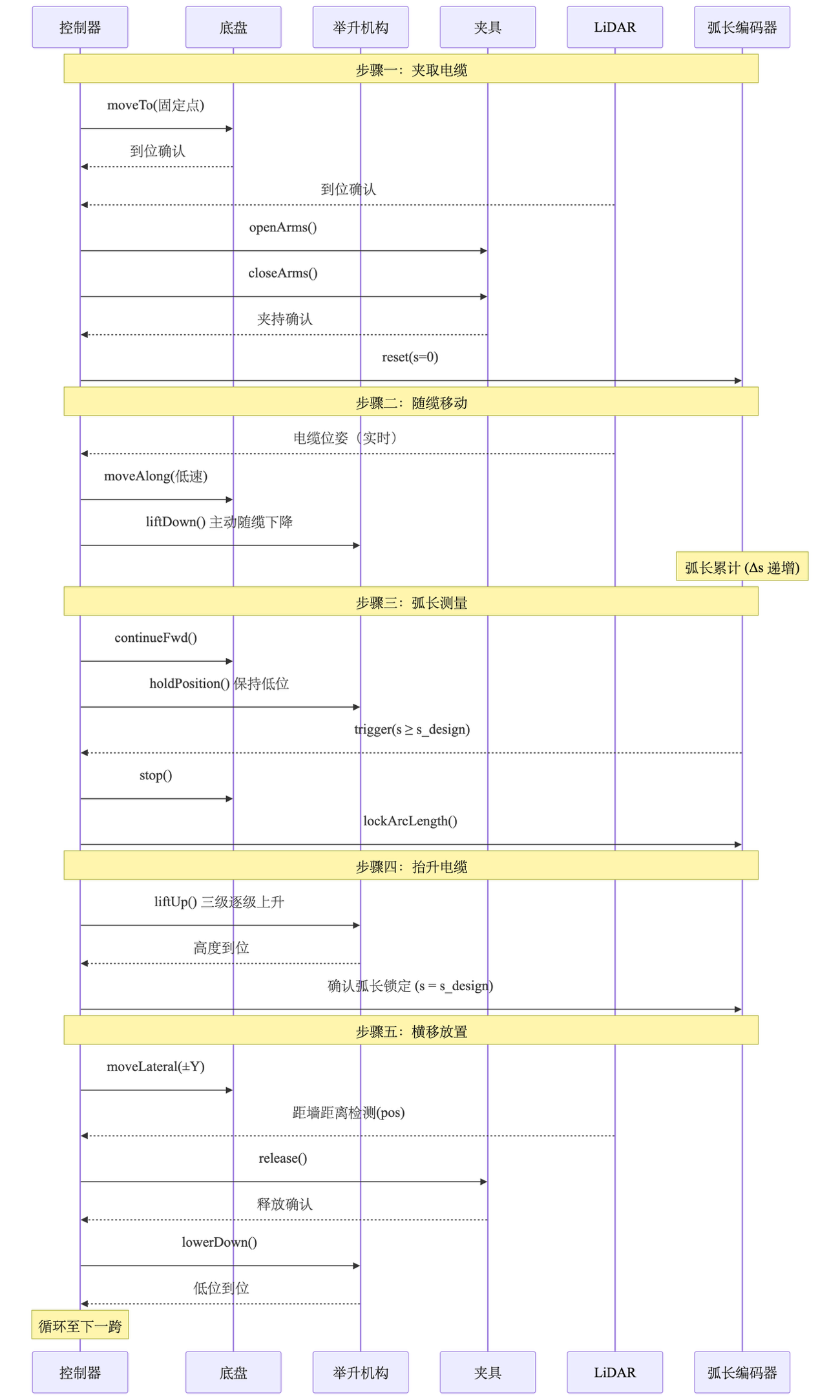
将梁理论BVP模型嵌入弧长控制策略,实现敷设精度从经验判断到模型前馈控制的转变;使用两阶段圆拟合策略实现单视角部分电缆的位姿检测;构建感知-规划-执行完整作业链路。
项目成果及应用前景
在ROS 2与Gazebo仿真平台完成仿真验证。成果可为电缆隧道施工的智能化升级提供技术方案。