吴航
专业名称:工程力学
指导教师:刘锦阳
毕业去向:本校机械工程专业直博
在校期间学术成果或科创实践成果:发表会议论文(第一作者)一篇,
第46期PRP结题
项目概述
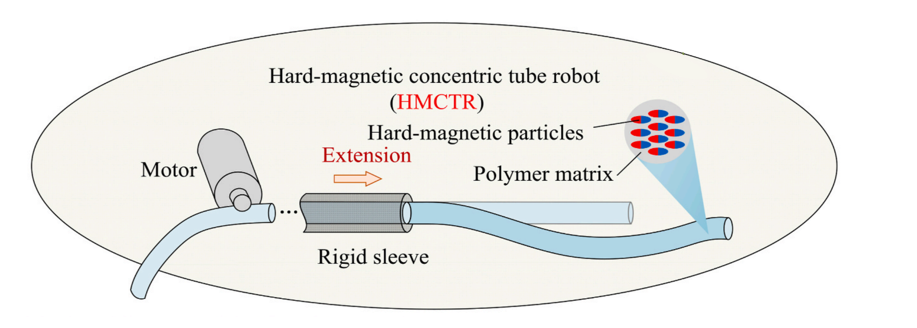
硬磁软连续体机器人融合了高分子材料的柔顺性与磁场驱动的无线操控优势,在微创医疗、狭窄空间探测等领域展现出广阔的应用前景。然而,该类机器人在变长度进给与大范围磁致弯曲过程中,存在大范围运动、大变形及多物理场交互效应,给动力学建模与运动控制带来了显著困难。针对上述问题,本文系统开展了硬磁软连续体机器人的动力学建模、数值仿真与运动控制研究。
项目创新点
(1) 为了解决变长度大变形梁数值模拟存在的精度问题,提出了基于单元长度与曲率阈值的“分裂-合并”动态网格自适应更新策略,在抑制数值振动与提升仿真精度方面具有显著优势。
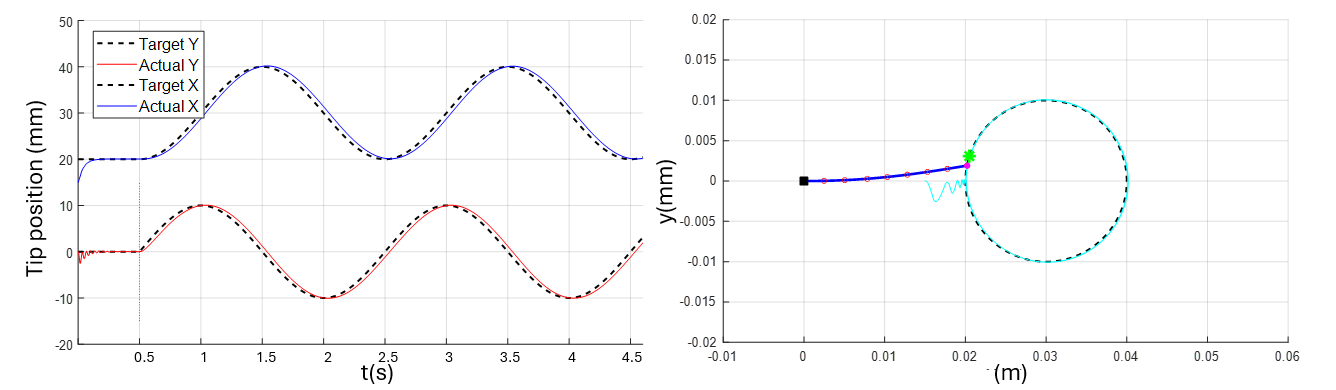
(2) 针对磁驱动软体机器人的运动控制问题,提出了“离线前馈+在线反馈”的双层复合运动控制框架,在继承前馈模型计算开销极小、大范围定位准确等优势的同时,通过反馈补偿有效缩短了动态响应时间。
项目成果及应用前景
在动力学建模方面,基于任意拉格朗日-欧拉描述(ALE)与绝对节点坐标法(ANCF)相融合的ALE-ANCF框架,建立了变长度梯度缩减梁单元模型,完整推导了考虑质量流动的广义质量矩阵、附加惯性力阵及广义弹性力阵,并建立了包含瑞利阻尼与常规外载荷的系统全局动力学控制方程。在磁致载荷方面,分别导出了均匀磁场与非均匀磁场下的磁力-磁力矩联合广义力模型。在数值求解方面,采用广义-α隐式积分算法构建了非线性求解框架,提出了基于单元长度与曲率阈值的动态网格自适应更新策略,自主开发了模块化仿真平台,并通过重力摆算例与磁场驱动算例验证了模型的正确性。
在运动控制方面,首先建立了基于全阶ALE-ANCF模型的非线性模型预测控制框架(NMPC),验证了其理论控制性能,同时揭示了其在计算实时性方面的根本性瓶颈。为突破该瓶颈,提出了基于数据驱动的逆运动学前馈模型——通过非均匀空间网格遍历与冗余解代价优选构建连续逆解映射,并将该前馈模型与基于极坐标解耦的在线PID反馈控制器相结合,形成复合控制框架。该复合控制框架较全阶NMPC方法计算效率提升约50倍,在轨迹跟踪测试中消除了高频抖振现象,具有较高的工程实用价值。