张泽林
专业名称:工程力学(强基计划)
指导教师:颜志淼
毕业去向:本校工程力学专业直博
在校期间学术成果或科创实践成果:第十九届“挑战杯”全国大学生课外学术科技作品竞赛 上海市一等奖
产出四项发明专利以及两项软件著作权
第二十七期“澳门新浦新京5197网站大学生创新实践计划”,国家级大创项目结题
第二十九期“澳门新浦新京5197网站大学生创新实践计划”,国家级大创项目结题
第一期“强基计划”科创实践项目结题
澳门新浦新京5197网站第45期PRP项目结题
项目概述
鸟类扑翼飞行在强非定常条件下兼具稳定、推进与机动,但翼尾协同的受力调节与反馈控制规律仍缺少统一解释。以成年雄性白鸽为对象,结合高速摄影、三维重建、逆动力学和线性混合效应建模,构建了从运动学、动力学到控制律辨识的分析链路。结果表明,鸽子扑翼飞行具有“基础对称扑动—姿态配平—转向修正”的分层结构;上升阶段呈现“翼主动力、尾配平、瞬态项俯仰修正”的分工,并存在约4帧时延的相位相关反馈;下降过程可分为两个控制目标不同的阶段。相关结论可为扑翼飞行器的分层控制与延迟补偿设计提供依据。
项目创新点
建立了从三维运动重建、逆动力学反演、气动映射到控制律辨识的逐帧统一分析框架,实现了从真实鸟类运动到受力与控制目标的直接关联。
揭示了鸽子扑翼飞行“基础双翼对称扑动—姿态配平—转向修正”的分层控制结构,将复杂翼尾协同规律归纳为具有明确物理含义的协同控制模态。
识别了上升周期及下降两阶段的相位相关延迟反馈控制律,提出后半周期是反馈写入和翼尾重整关键窗口,并给出了约 4 帧有效延迟的定量结果。
项目成果及应用前景
本项目完成了白鸽扑翼飞行的实验测量、三维重建与动力学反演流程构建;在上升且不转向工况下,对前向气动力、竖直气动力和俯仰力矩的拟合优度均达到 0.70 以上,定量揭示了“翅膀负责主动力生成、尾翼负责低频配平、翼部瞬态项负责快速俯仰修正”的纵向分工;同时识别出上升阶段以及开始下降段、结束下降段两套反馈控制规律,其中下降两阶段模型综合评分分别达到 0.9301 和 0.9242。研究成果可为仿鸟扑翼飞行器的分层控制、相位增益调度、延迟补偿、轨迹跟踪与着陆缓冲设计提供理论依据,也可服务于低空智能飞行器、生物飞行机理研究和扑翼机器人控制系统开发。
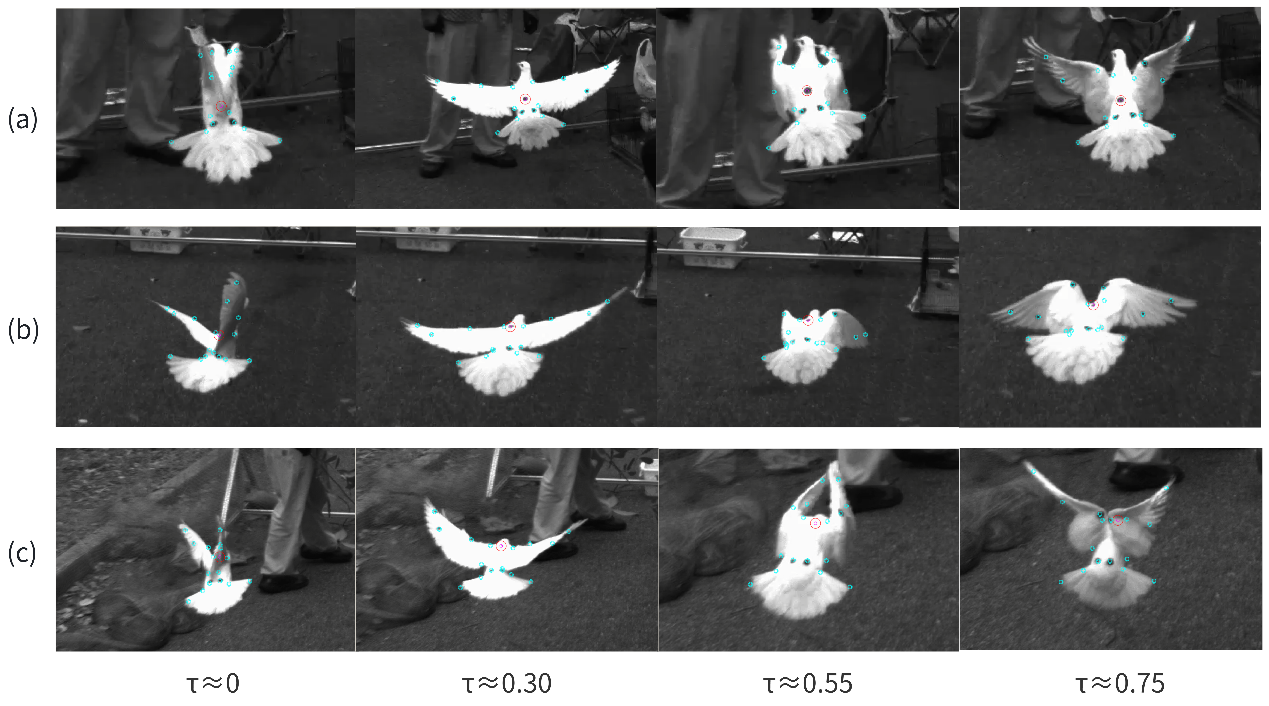
项目拍摄的鸽子上升、平飞、下降运动