李沛轩
专业名称:船舶与海洋工程
指导教师:张明阳
毕业去向:本校船舶与海洋工程专业硕士
在校期间学术成果或科创实践成果:以第一作者完成 ASME OMAE 2026 国际会议论文 1 篇,终稿已接收、待发表;
2024年第45期本科生研究计划(PRP)项目结题;
2024年第28期澳门新浦新京5197网站大学生创新实践计划项目结题;
第十五届全国周培源大学生力学竞赛(个人赛)国家二等奖;
项目概述
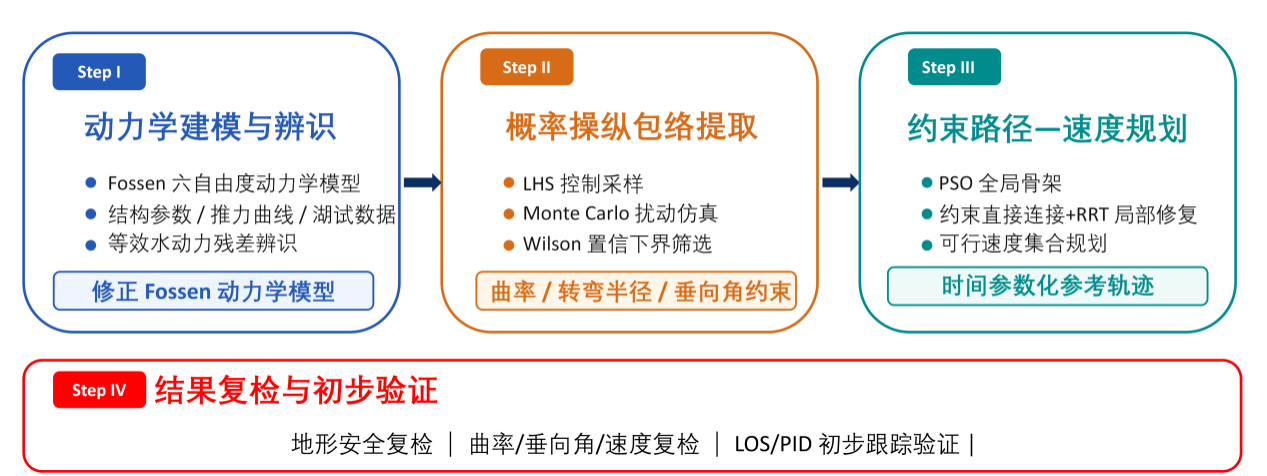
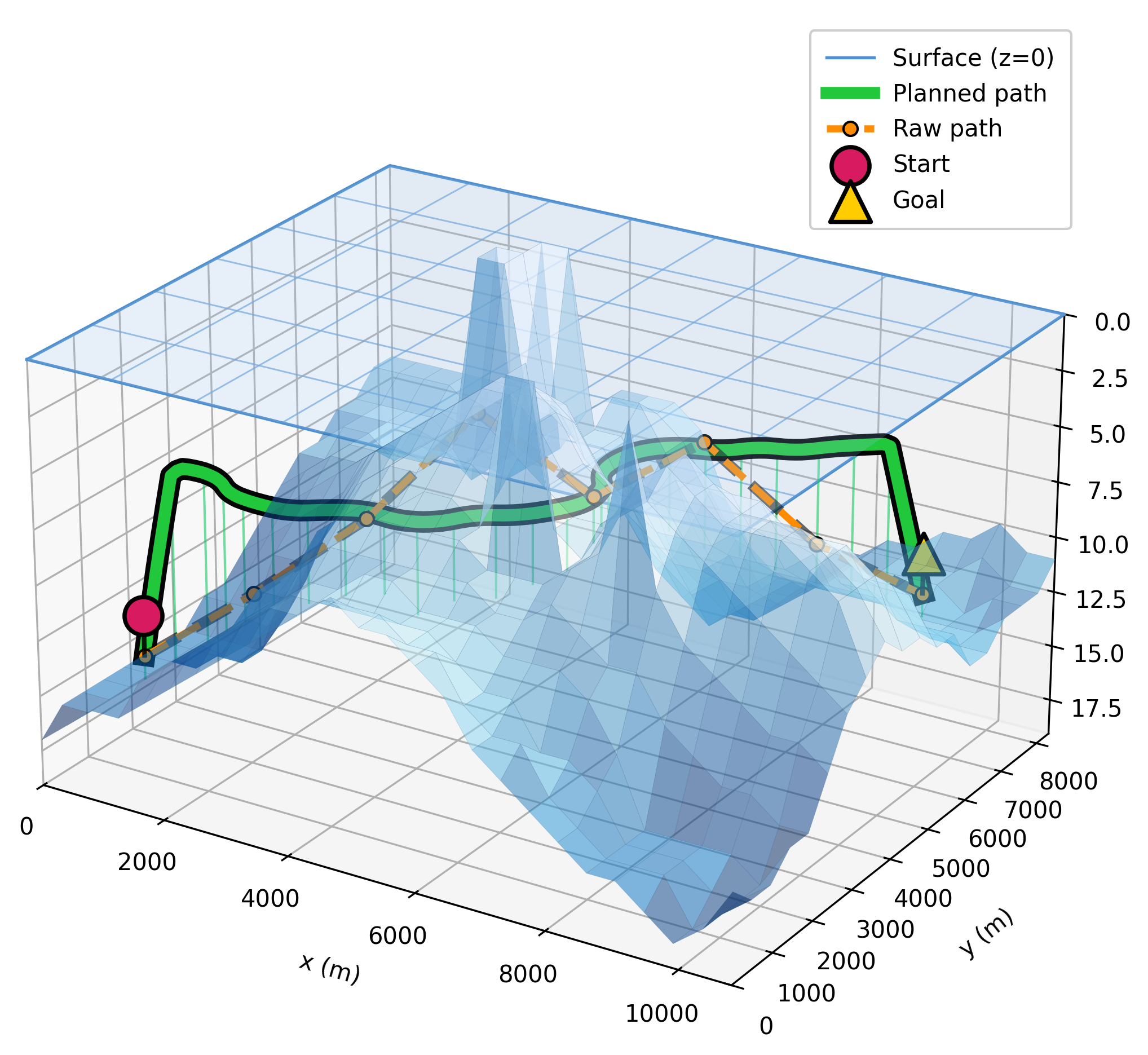
本项目面向无人水下航行器在复杂水下环境中的自主航行问题,针对传统路径规划方法难以反映真实动力学约束、规划路径可能“几何可行但实际难以执行”的问题,提出基于操纵运动建模的路径智能优化方法。项目基于 Fossen 六自由度动力学模型,结合 533 mm UUV 结构参数、推进器特性和湖试数据进行模型修正,并通过概率操纵包络将航行器转弯半径、水平曲率和垂向角等操纵能力转化为路径规划约束,最终生成满足地形安全和动力学可执行性的三维参考轨迹。
项目创新点
数据支撑的Fossen模型修正:在保留六自由度动力学物理结构的基础上,引入湖试数据,对UUV等效水动力残差进行结构化辨识。
概率操纵包络约束提取:通过LHS控制采样、Monte Carlo仿真和Wilson置信下界筛选,将高维非线性操纵响应压缩为速度相关的曲率、转弯半径和垂向角边界。
路径—速度联合规划与复检:构建“PSO 全局骨架—约束连接—RRT 局部修复—速度规划”的分层路径规划框架,使输出轨迹从“空间路径”扩展为带速度的时间参数化参考轨迹,兼顾搜索效率、地形安全和操纵约束。
项目成果及应用前景
项目完成了 UUV 动力学建模、概率操纵包络提取和约束路径规划的完整流程。仿真结果表明,所提方法能够在浅水复杂地形和 GEBCO 实际海图数据下生成满足操纵约束的三维参考轨迹,并具备初步可跟踪性。成果可用于 UUV 自主航行、海底地形调查、水下巡检和海洋工程辅助决策等场景,为提升路径规划安全性与工程适用性提供支撑。