石梦迪
专业名称:船舶与海洋工程
指导教师:楼建坤
毕业去向:本校船舶与海洋工程专业硕士
在校期间学术成果或科创实践成果:发表EI会议论文1篇(第一作者),2025年第46期本科生研究计划(PRP)项目结题,2024-2025年第27、29、30期大学生创新创业训练计划(IPP)项目结题,第十三届全国海洋航行器设计与制作大赛全国一等奖
项目概述
本项目以40吨级中型海洋无人艇为研究对象,针对局部浪高骤增、浪向突变等海况突变现象引发船舶大幅横摇、纵摇,并进而导致设备停机、作业中断甚至安全事故的问题,聚焦传统气象导航重全局预报、弱局部实时避浪的技术短板,项目开展相关研究并最终形成一套依托船舶实时波浪感知、以姿态最优为目标的局部动态避浪路径生成方案,。项目核心研究内容如下:
1. 船舶-波浪耦合建模:依托MMG操纵理论、JONSWAP随机波浪谱、RAO波浪幅值响应算子搭建一体化仿真体系;
2. 局部避浪路径算法设计:基于改进动态窗口DWA框架,分别开发对照性质的IMO经验避浪算法与RAO-波面过限联合优化算法;
3. 多工况仿真验证:结合前述研究内容搭建含LOS制导+双PID闭环控制的仿真平台,通过低海况、横浪、极端变浪三类仿真试验对比算法性能,
项目创新点
1. 提出“RAO -波面升高过限联合避浪算法”:采用分区双层约束优化逻辑,将航行海域划分为波面超限危险区与常规海域分别进行避浪规划:对前者,基于波峰数据将海区计算等效为动态圆形移动障碍,并采用几何避障方法从物理层面直接规避巨浪直击;对后者,基于能量最优,通过迎浪角-遭遇频率双向RAO插值响应实时预测浪区内候选航线的姿态响应,选取最小化姿态响应的航线执行。
2. 搭建改良控制空间的DWA算法框架:相较于传统动态窗口法的“角速度-线速度”的控制模式,项目结合船舶实际操纵逻辑,构建“航向角-航速”二维搜索空间,直接适配无人艇LOS循迹、PID控制器输入,并通过代价函数模块设计实现不同避浪策略的快速切换。
3.实现完整“波浪环境-船舶运动-决策规划”仿真闭环:项目整合波浪环境、船舶运动模型、局部避浪规划算法、LOS视线引导+双PID控制模块,动态更新环境输入,实现“环境实时变化->路径重规划->船舶受控航行->运动状态更新”的实时动态滚动,形成数据互通的完整闭环仿真体系,支持快速高效完成不同仿真试验。
项目成果及应用前景
项目开发基于IMO海事规范的经验避浪路径算法1套,自研RAO-波面升高过限联合避浪核心算法1套,并搭建含波浪环境仿真、避浪路径规划、三自由度闭环控制与数据可视化四大模块的一体化虚拟仿真平台1套。未来经进一步研究完善,可用于以下工程场景:
1.海洋测绘与科考无人船:面向地形测绘、海洋环境采样中型无人艇,搭载本算法后可在5级恶劣海况下动态局部避浪,如南海研究海域可每年延长有效作业窗口期60天以上,大幅缩减出海作业成本,适配自然资源部海底地貌调查规范(HY/T0353-2023)。
2.近海巡检、安防无人艇:应用于海事巡逻、近海浮标值守、岛礁补给小型无人艇,应对近海突发局地风暴浪,提升恶劣天气下航行安全性,减少装备损毁与任务取消概率。
3.传统远洋船舶辅助局部导航:可作为现有商用气象导航系统局部补强插件,弥补传统导航局部海况响应滞后缺陷,在突变浪区自动微调航线,降低船舶横摇失稳、甲板上浪风险。
4.产业化拓展:后续可优化算法轻量化、融合船载雷达近场测浪数据、拓展多艇编队协同避浪,可批量集成至国产中小型无人艇控制系统,面向海洋装备厂商实现算法配套落地。
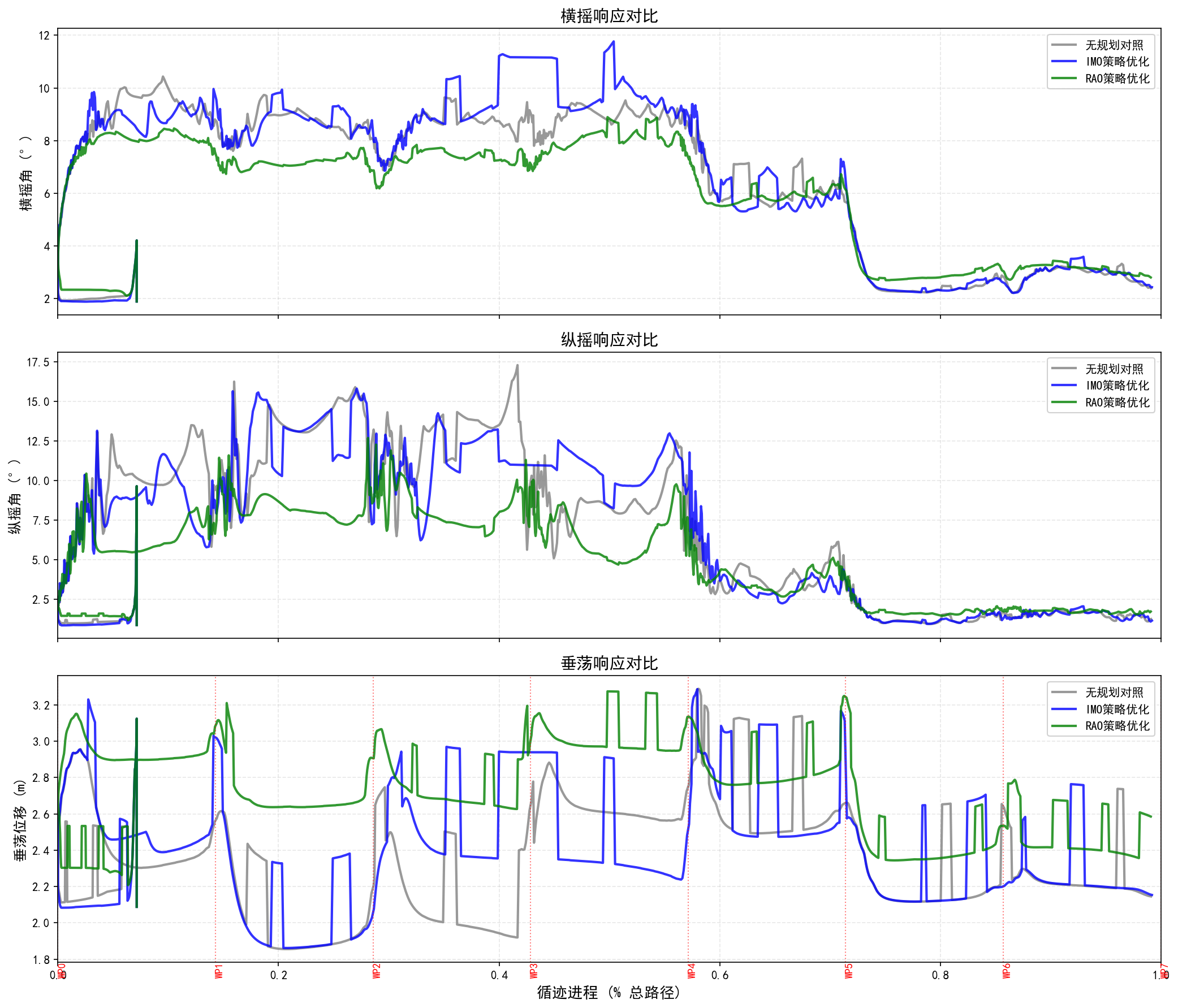
极端海况试验姿态响应(相同航段对比)
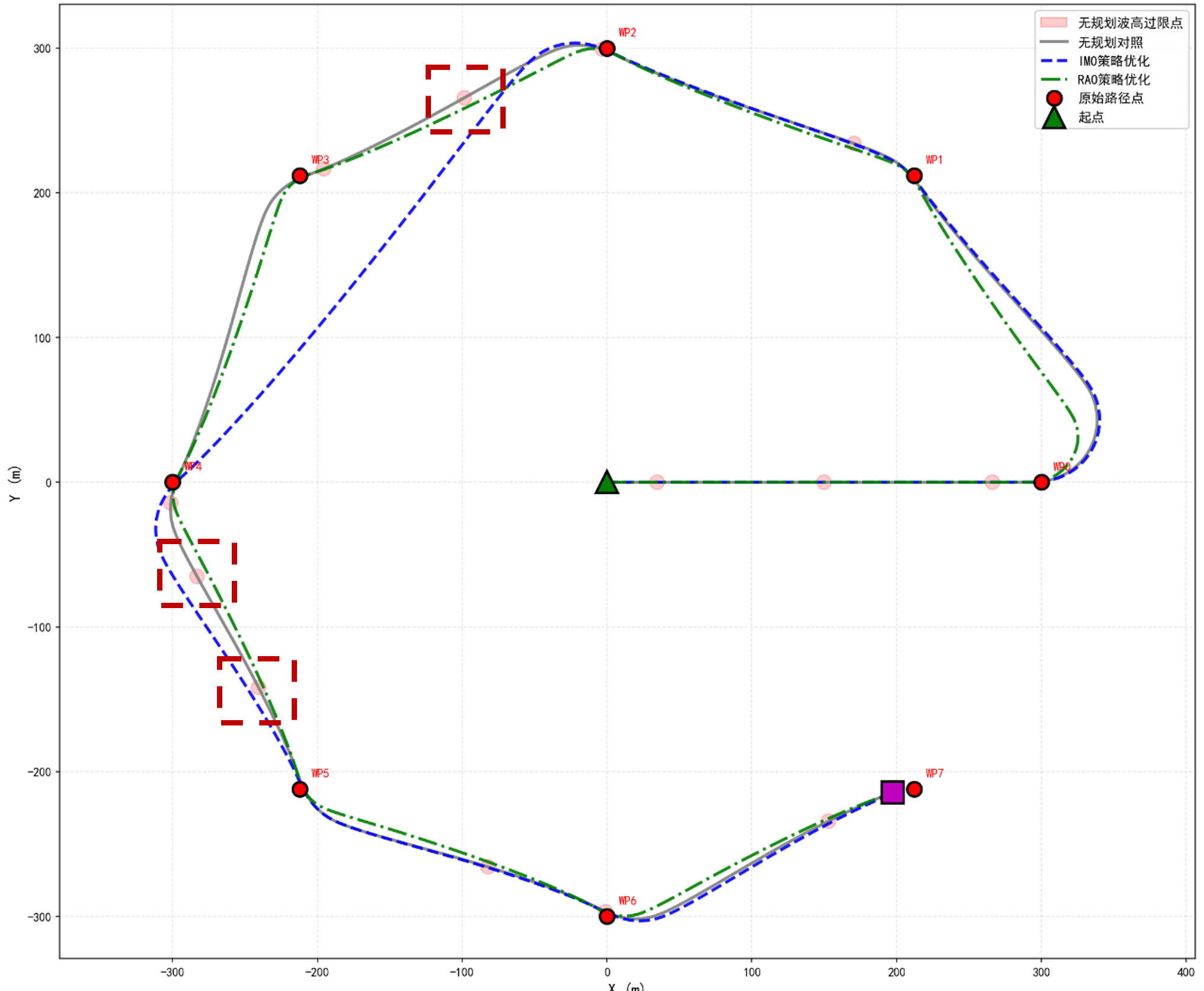
极端海况试验轨迹图(红框标记波面升高过限避让)