刘益君
专业名称:船舶与海洋工程
指导教师:刘积昊
毕业去向:本校船舶与海洋工程直博
在校期间学术成果或科创实践成果:发表SCI论文1篇
第28期大学生创新创业训练项目结题并获十佳项目
第31期大学生创新创业训练项目结题
钱学森杯校二等奖
第十四届全国海洋航行器设计与制作大赛全国一等奖
项目概述
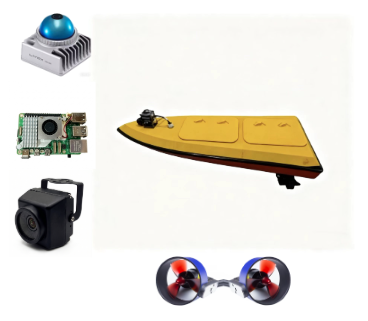
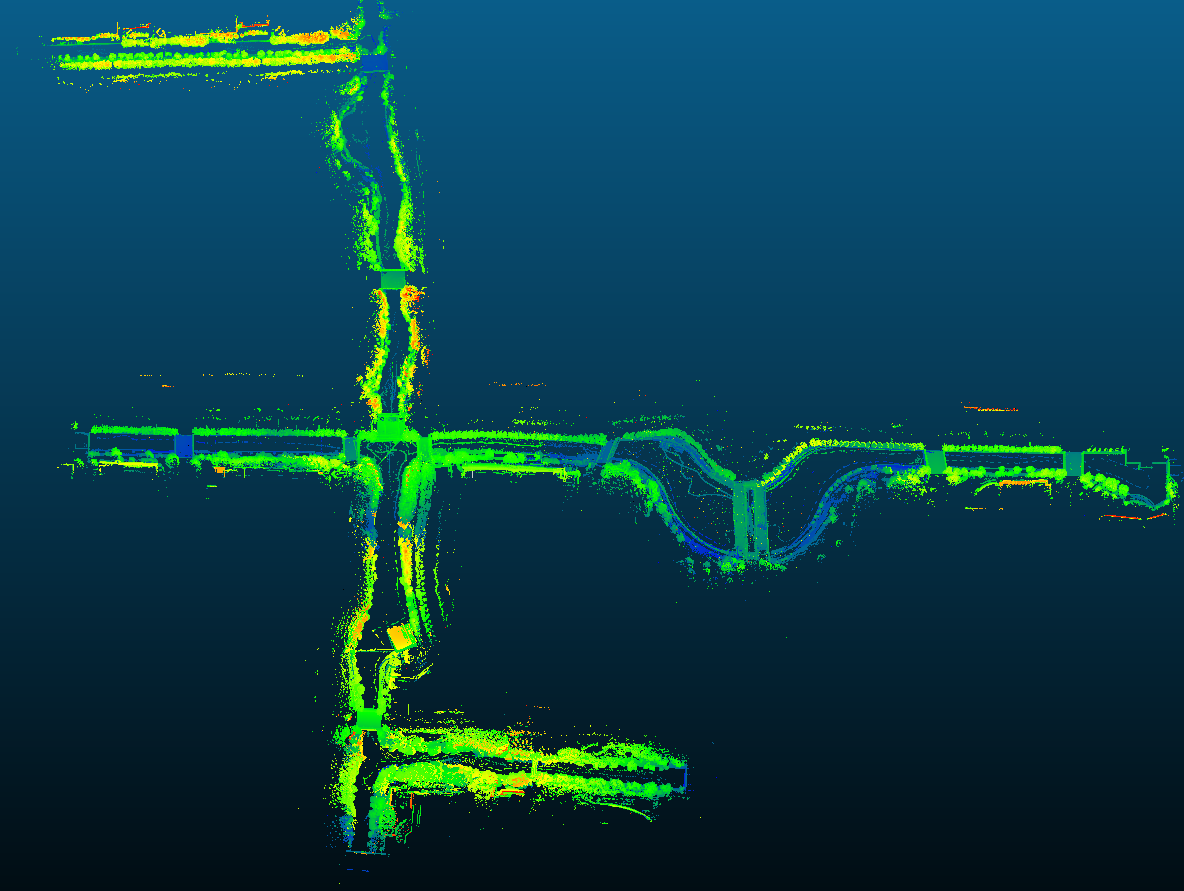
本项目针对水面强光、特征稀疏等问题,研发水面无人船场景感知与自主航行系统。基于树莓派 5 搭建多传感硬件平台,优化 FAST-LIO 算法并融合 YOLOv8-Seg 实现点云降噪,采用 A * 结合 DWA 算法完成路径规划与动态避障。经河道实测与仿真验证,系统定位稳定、避障可靠,可应用于内河巡航、水域监测等场景。
项目创新点
SLAM 算法针对性优化、跨模态数据融合、系统安全防护设计、双层航行规划架构
项目成果及应用前景
本系统定位建图稳定、避障响应及时,适配各类内河水域。可落地于内河巡航、水质监测、港口巡检等场景,具备良好工程价值与推广潜力。