张芷淇
专业名称:船舶与海洋工程
指导教师:王检耀
毕业去向:本校船舶与海洋工程专业硕士
在校期间学术成果或科创实践成果:2025年第46期本科生研究计划(PRP)风力助推节能装置评估计算器的开发项目结题
项目概述
针对在水下复杂大陆架环境中执行近底定高航行任务的UUV设计了一种兼具全局与局部最优的三维路径规划器。
项目创新点
1、提出细分正六边形网格的网格划分方式,降低单点可达邻节点的数量,以提高全局层路径搜索效率。
2、提出全局与局部分层规划的框架以平衡全局与局部最优;
3、搭建了基于“情景与行为”匹配机制的应急模式避障框架以提升UUV避障的实时性。
项目成果及应用前景
本论文的研究成果可为无人潜航器在复杂大陆架环境中的自主导航与动态避障提供兼具数学最优性与工程可执行性的三维路径规划方案,广泛应用于海底巡检、军事侦察、海洋科考等水下作业任务。
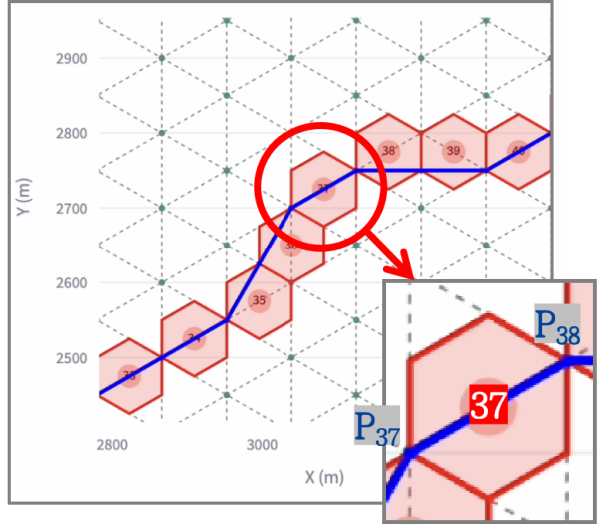
图1 全局引导点生成及子地图划分
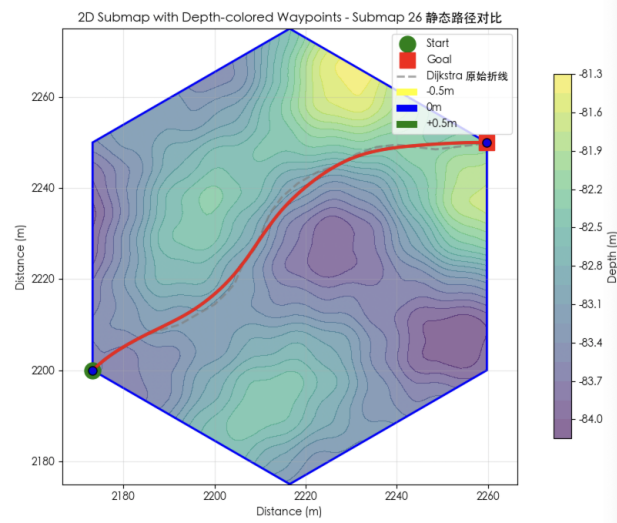
图2 子地图三维路径规划及优化